


在前面我们介绍了 Docker 镜像的概念和基本操作,这篇文章我们来深入剖析一下 docker 镜像分层技术。
1. 分层结构
为什么说是镜像分层技术,因为Docker 镜像是以层来组织的,我们可以通过命令 docker image inspect <image> 或者 docker inspect <image> 来查看镜像包含哪些层。下面是一个示例。
[root@docker ~]# docker image inspect busybox:latest
...
"RootFS": {
"Type": "layers",
"Layers": [
"sha256:195be5f8be1df6709dafbba7ce48f2eee785ab7775b88e0c115d8205407265c5"
]
},
如上图所示,其中 RootFS 就是镜像 busybox:latest 的镜像层,只有一层,那么这层数据是存储在宿主机哪里的呢?好问题。动手实践的同学会在上面的输出中看到一个叫做 GraphDriver 的字段内容如下。
"GraphDriver": {
"Data": {
"LowerDir": "/var/lib/docker/overlay2/cd7a.../diff",
"MergedDir": "/var/lib/docker/overlay2/da4c.../merged",
"UpperDir": "/var/lib/docker/overlay2/da4c../diff",
"WorkDir": "/var/lib/docker/overlay2/da4c.../work"
},
"Name": "overlay2"
},
GraphDriver 负责镜像本地的管理和存储以及运行中的容器生成镜像等工作,可以将 GraphDriver 理解成镜像管理引擎,我们这里的例子对应的引擎名字是 overlay2(overlay 的优化版本)。除了 overlay 之外,Docker 的 GraphDriver 还支持 btrfs、aufs、devicemapper、vfs 等。
我们可以看到其中的 Data 包含了多个部分,这个对应 OverlayFS 的镜像组织形式,在下面我们再进行详细介绍。虽然我们上面的例子中的 busybox 镜像只有一层,但是正常情况下很多镜像都是由多层组成的。
这个时候很多同学应该会有这么一个疑问,镜像中的层都是只读的,那么我们运行着的容器的运行时数据是存储在哪里的呢?
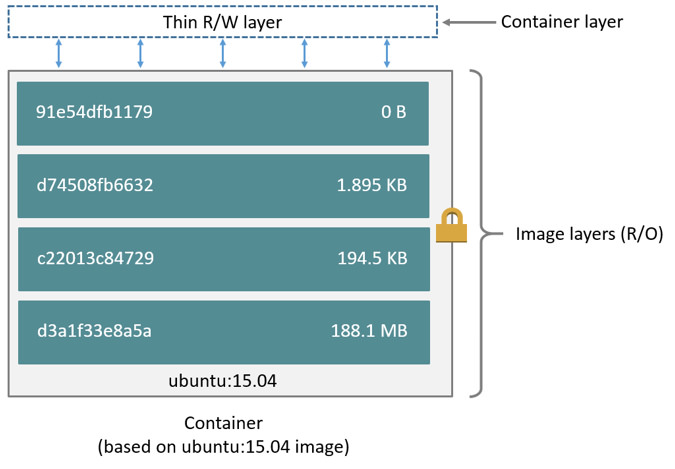
镜像和容器在存储上的主要差别就在于容器多了一个读写层。镜像由多个只读层组成,通过镜像启动的容器在镜像之上加了一个读写层。下图是官方的一个配图。我们知道可以通过 docker commit 命令基于运行时的容器生成新的镜像,那么 commit 做的其中一个工作就是将读写层数据写入到新的镜像中。下图是一个示例图:
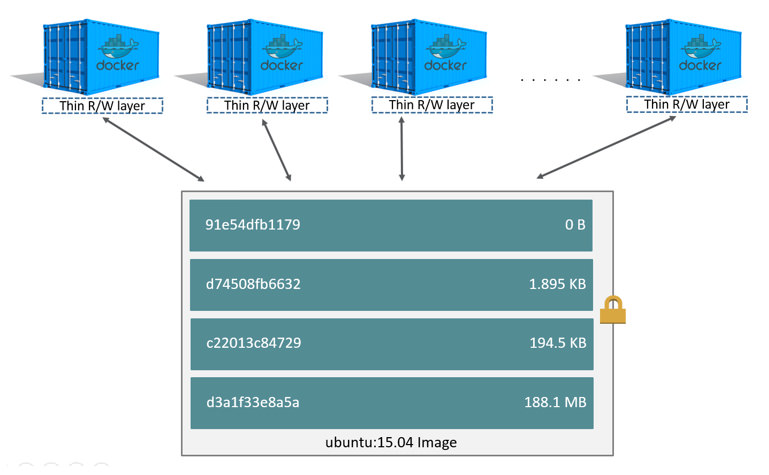
所有写入或者修改运行时容器的数据都会存储在读写层,当容器停止运行的时候,读写层的数据也会被同时删除掉。因为镜像层的数据是只读的,所有如果我们运行同一个镜像的多个容器副本,那么多个容器则可以共享同一份镜像存储层,下图是一个示例。
2. UnionFS
Docker 的存储驱动的实现是基于 Union File System,简称 UnionFS,中文可以叫做联合文件系统。UnionFS 设计将其他文件系统联合到一个联合挂载点的文件系统服务。
所谓联合挂载技术,是指在同一个挂载点同时挂载多个文件系统,将挂载点的源目录与被挂载内容进行整合,使得最终可见的文件系统将会包含整合之后的各层的文件和目录。
举个例子:比如我们运行一个 ubuntu 的容器。由于初始挂载时读写层为空,所以从用户的角度来看:该容器的文件系统与底层的 rootfs 没有区别;然而从内核角度来看,则是显式区分的两个层。
当需要修改镜像中的文件时,只对处于最上方的读写层进行改动,不会覆盖只读层文件系统的内容,只读层的原始文件内容依然存在,但是在容器内部会被读写层中的新版本文件内容隐藏。当 docker commit 时,读写层的内容则会被保存。
写时复制(Copy On Write)
这里顺便介绍一下写实复制技术。
我们知道 Linux 系统内核启动时首先挂载的 rootfs 是只读的,在系统正式工作之后,再将其切换为读写模式。Docker 容器启动时文件挂载类似 Linux 内核启动的方式,将 rootfs 设置为只读模式。不同之处在于:在挂载完成之后,利用上面提到的联合挂载技术在已有的只读 rootfs 上再挂载一个读写层。
读写层位于 Docker 容器文件系统的最上层,其下可能联合挂载多个只读层,只有在 Docker 容器运行过程中文件系统发生变化时,才会把变化的文件内容写到可读写层,并隐藏只读层的老版本文件,这就叫做 写实复制,简称 CoW。
3. AUFS
AUFS 是 UnionFS 的一种实现,全称为 Advanced Multi-Layered Unification Filesystem,是早期 Docker 版本默认的存储驱动,最新的 Docker 版本默认使用 OverlayFS。
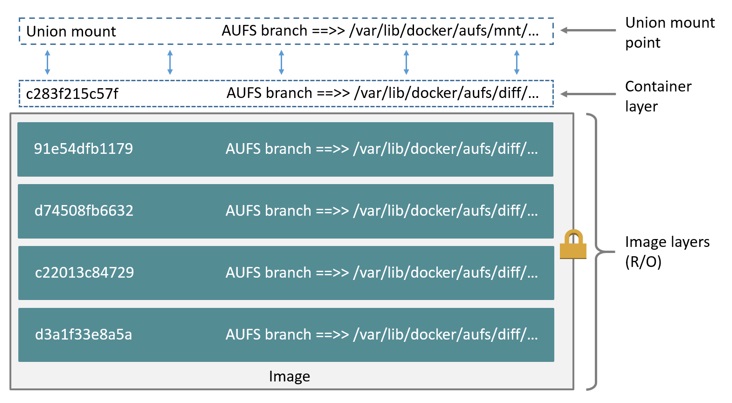
AUFS 将镜像层(只读)组织成多个目录,在 AUFS 的术语中成为 branch。运行时容器文件会作为一层容器层(container lay,读写)覆盖在镜像层之上。最后通过联合挂载技术进行呈现。下图是 AUFS 的文章组织架构的示意图。由于 AUFS 可以算是一种过时的技术,所以这里我们就不在赘述了。
4. OverlayFS
OverlayFS 是类似 AUFS 的联合文件系统的一种实现,相比 AUFS 性能更好,实现更加简单。Docker 针对 OverlayFS 提供了两种存储驱动:overlay 和 overlay2 ,我们在前面的演示部分就是 overlay2。这两种驱动相比之下,overlay2 在 inode 使用率上更加高效,所以一般也是推荐 overlay2,Linux 内核版本要求是 4.0 或者更高版本。
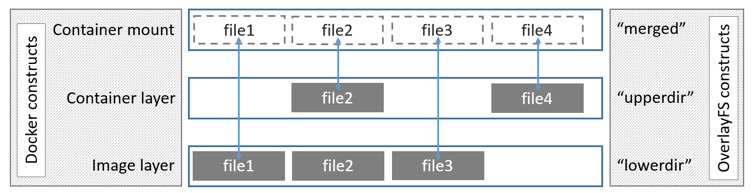
OverlayFS 将镜像层(只读)称为 lowerdir,将容器层(读写)称为 upperdir,最后联合挂载呈现出来的为 mergedir。文件层次结构可以用下图表示。 从图中我们也可以看出相比 AUFS,文件层更少,这也是 OverlayFS 相比 AUFS 性能更好的一个原因。
举个例子,下图是我们运行中的 busybox 容器的 docker inspect 的结果。
我们在容器中做的改动,都会在 upperdir 和 mergeddir 中体现。比如我们在容器中的 /tmp 目录下新建一个文件,那么在 upperdir 和 mergeddir 中就能够看到该文件。
5. 总结
本文先通过 docker inspect 示例入手分析了 Docker 的镜像分层技术,然后又补充了部分理论知识,包括 UnionFS 、AUFS 和 OverlayFS。当然除了 AUFS 和 OverlayFS,还有一些其他的存储驱动,比如 Btrfs、DeviceMapper、ZFS、VFS,感兴趣的同学可以自行了解。
